
Всем привет, дорогие друзья. С вами Денис Курец и в этом материале мы поговорим о наиболее популярных робототехнических конструкторах. В наш век прогресса, роботы уже не кажутся чем-то заоблачным и фантастическим. Все современные образовательные учреждения (школы, техникумы и ВУЗы) стараются включить в образовательный процесс элементы робототехники. Чаще всего роботов собирают и программируют ребята, занимающиеся в соответствующих кружках. Участники таких кружков не только регулярно соревнуются друг с другом на своей базе, но также принимают участие в соревнованиях против команд из других учебных заведений.
В нашем техникуме уже несколько месяцев функционирует Республиканская инновационная площадка развития образовательной робототехники. Студенты активно занимаются изучением наборов конструкторов и разрабатывают практические задания, чтобы вновь пришедшие члены кружка могли как можно быстрее разобраться в базовых вопросах. К сожалению, материальная база пока не позволяет поработать со всеми существующими на рынке платформами.
А ведь помимо популярных конструкторов от Lego, есть множество классных наборов, которые ничуть не хуже продукции именитых брендов позволяют развить творческое мышление у юных инженеров. Сегодня мы пристально рассмотрим самые распространённые робототехнические комплексы, применяемые в школах, колледжах и ВУЗах по всему миру.
Начнём с самой узнаваемой версии конструктора от именитого бренда Lego. Легендарный Mindstorms EV3 (по нашему ИВИ 3) появился в продаже в далёком 2013 году. Буквально за несколько лет он стал самым популярным робототехническим набором в учебных заведениях. Базовая версия набора конструктора состоит из элементов, с помощью которых можно создавать простенькие механизмы. Для тех, кто хочет заниматься серьёзными проектами и участвовать в соревнованиях разработчики выпустили ресурсный набор, содержащий вспомогательные элементы.
По опыту могу сказать, что для занятий в кружке к двум базовым наборам вполне достаточно докупить один ресурсный. К тому же можно дополнительно заказать фирменные датчики от Lego или расширить набор компонентов за счёт оборудования сторонних вендеров, таких как SmartBricks и HiTechnic. Что касается среды написания программ для Mindstorms, то тут вариантов хоть отбавляй. Для тех кто ранее не сталкивался с программированием подойдут графические среды EV3-G, Scratch и Robolab, а профессионалы легко смогут найти общий язык с платформой на Python"е и Java.
Стоимость одного базового набора Lego Mindstorms EV3 Education на сегодняшний день (09.06.2017) варьируется в районе 28000 рублей. Дополнительный ресурсный комплект с элементами обойдётся вам в 9000 рублей. Такое вот не дешёвое развлечение эти роботы от лего. Однако, невзирая на высокую стоимость, данный набор можно по праву назвать идеальным инструментом для обучения основам робототехники и программирования. Его с успехом можно рекомендовать к освоению не только школьникам и студентам, но и взрослым людям интересующимся инновациями.
Не обделило вниманием Lego и совсем юные дарования. Наборы WeDo в первую очередь направлены на контингент начальной школы. С помощью базового комплекта учащиеся могут экспериментировать с созданием своих первых моделей, практиковаться в написании отчётов и делиться друг с другом новыми идеями. Основной набор состоит из мотора и двух датчиков (наклона и движения). Как и в случае ИВИ3 для работы над проектами повышенной сложности разработчики вынуждают докупить ресурсный набор со вспомогательными электронными компонентами.
В версии WeDo 2.0 робот получил возможность автономной работы. До этого управление осуществлялось только с помощью USB-коммутатора. Для составления программ тут используется собственная интуитивно-понятная среда Lego WeDo. В удобной форме путём простого перемещения блоков мышью создаются хитроумные алгоритмы. Базовая методичка включает в себя 12 уроков. Для расширения возможностей можно программировать в среде Scratch. Именно с её помощью на платформе WeDo реализуются самые интересные и запоминающиеся творческие проекты.
Что же касается ценника, то тут всё чуточку побюджетней чем с Mindstorms. 10000 рублей за первую версию базового набора + 5000 рублей за ресурсный комплект. Программное обеспечение с графической средой и книжка с разработанными заданиями обойдутся ещё в 8000 рублей. Хотя можно немного сэкономить и купить WeDo 2.0 за 15000. В его состав уже входит программное обеспечение, правда с ограниченным функционалом. Для сложных проектов данная платформа совсем не годится. Мало возможностей. Однако при избытке ресурсов её можно с успехом использовать как промежуточный этап перед переходом на EV3.

Третий участник нашего списка это робототехнические наборы конструкторов Tetrix и Matrix. Оба этих набора позволяют значительно расширить возможности роботов построенных на микроконтроллере от LEGO Mindstorms, однако собственный контроллер в них отсутствует. С помощью элементов от конструкторов Tetrix и Matrix учащиеся освоившие базовые наборы от LEGO могут попробовать свои силы в создании моделей из металла. Базовый комплект Tetrix’а, как правило, включает в себя различные соединительные балки, колёса, моторы и другие необходимые элементы.
Программируются обе платформы аналогично Lego Mindstorms"у. Удобнее всего использовать для написания программ такие языки программирования как NXT-G, LabVIEW и C. Что касается цен на наборы то они мягко говоря кусаются. Базовый набор Tetrix по распродаже сейчас можно приобрести за 64000 рублей, а ресурсный обойдётся вам в 20000. Не каждое учебное заведение может себе позволить даже одно рабочее место, не говоря уже о полноценных закупках комплектов для робототехнического кружка.

Последнее время среди маленьких любителей роботов становятся популярны конструкторы на базе одноплатных компьютеров Arduino и Raspberry Pi. Данные платы обладают собственным слабеньким процессором и памятью. К ним с лёгкостью можно подключать различные компоненты: лампочки, моторчики, датчики. А при желании даже магнитный замок, электрический чайник и кофеварку. Правда, для того, чтобы использовать все возможности робототехнических механизмов нужно как минимум разбираться в базовых вопросах микроэлектроники.
В настоящее время комплексные наборы для робототехнических кружков на базе Arduino и Raspberry Pi явление редкое. Гораздо чаще конструкторы самостоятельно формируют наборы из отдельных электронных компонентов, приобретаемых в доступном магазине радиоэлектроники. Обычно такой минимальный набор состоит из элементной базы, датчиков, макетной платы, шасси и проводов для соединения. Дополнительные элементы при желании можно изготовить при помощи фрезерного оборудования или распечатать на 3D принтере.
В России самым популярным обучающим набором на платформе Arduino является «Амперка». С его помощью учащиеся могут собрать мобильного робота без использования паяльника. В комплекте помимо базовых компонентов (резисторов, светодиодов, транзисторов и т.д.) прилагается учебное пособие. Учебник содержит 17 параграфов, каждый из которых рассчитан на 45 минутный урок. Этот материал является хорошим подспорьем в обучении прикладному программированию, а также помогает закрепить навыки работы с микроконтроллерами. По данным с официального сайта, стоимость одного образовательного набора «Амперка» на сегодняшний день составляет 16000 рублей.

Вернёмся за школьные парты. Групповая проектная деятельность уже стала привычным явлением для младшего звена. Наборы HUNA Kicky отлично подходят для школьников и дошколят. С их помощью ребята в раннем возрасте знакомятся с основными элементами робототехники. Серия Kicky подразделяется на три уровня сложности: базовый (Basic), средний (Junior) и продвинутый (Senior). Различаются они только количеством роботов и моделей. Все блоки конструктора выполнены из яркого разноцветного пластика и имеют возможность соединяться друг с другом с шести сторон.
Каждый из наборов помимо моделей комплектуется методическими пособиями с мануалами по сборке. Всё это конечно хорошо. Однако с виду готовые модели напоминают роботов очень отдалённо. HUNA Kicky скорее продвинутый детский конструктор, нежели серьёзная робототехническая база. При этом ценник на продукцию у наборов вполне себе взрослый. 12000 рублей за базовую версию и 15000 за продвинутую. Спорная инвестиция, если учесть, что возможности Kicky сильно ограничены. Тот же LEGO WeDo гораздо интереснее во всех отношениях.

Следующая категория наборов HUNA для начального образования это серия CLASS. Обновлённая в 2014 году коробочка содержит 2 платы, одну из которых можно самостоятельно перепрошить. Помимо этого в наборе имеется 2 двигателя, 2 серво-двигателя, различные датчики, детальки и что самое главное подробные методички с рекомендациями по сборке и программированию. Да-да, в ветке HUNA знакомство с программированием начинается с серии Class. Программная среда поддерживает как визуальный вариант, так и язык C++. Правда за всю эту прелесть создатели хотят ни много ни мало 43000 рублей. Не удивительно, что платформа с трудом конкурирует на рынке робототехнических конструкторов.
А вот серии, рассчитанные на учащихся старших классов (Top и Arduino), получились у HUNA более чем достойные. Детали конструктора добротные, алюминиевые. Разработчики не поскупились и вложили самые современные датчики, электродвигатели постоянного тока и модернизированный вариант материнской платы. Сборка одной модели занимает при лучшем раскладе 3-4 часа. Получившихся роботов уже нельзя назвать детсадовскими игрушками. Они отлично подходят для участия в соревнованиях международного уровня. Цена за полный TOP комплект в наиболее популярных интернет-магазинах варьируется в районе 40000 рублей.

Перейдём к робототехническим набором RoboRobo. В основную плату представителей данного сегмента интегрирован современный контроллер AT Mega. Несомненным плюсом этих конструкторов является простой принцип сборки. Все компоненты сделаны из добротных текстолитовых блоков, которые между собой соединяются при помощи винтиков. На сегодняшний день на рынке представлено шесть различных комплектов серии RoboKit и два RoboKids. Условно все они делятся по уровню сложности. Одни можно использоваться, начиная детского сада, другие отлично подойдут для студентов техникумов и даже ВУЗов.
Также как и у Lеgo к каждому из комплектов можно дополнительно приобрести ресурсный набор. Малая же распространённость RoboRobo в РФ обусловлена тем, что разработчики не русифицировали свою программную среду Smart Rogic, а энтузиасты из народа ленятся пополнять методическую базу в глобальной сети. В связи с этим многие преподаватели сталкиваются со сложностями при внедрении данных робототехнических наборов в образовательный процесс. С актуальными ценами комплектов на момент написания статьи вы можете ознакомиться в таблице.
| НАБОР | ЦЕНА (ИЮНЬ 2017) |
| RoboKids 1 | 11000 руб. |
| RoboKids 2 | 22000 руб. |
| RoboKit 1 | 10500 руб. |
| RoboKit 2 | 18000 руб. |
| RoboKit 3 | 26000 руб. |
| RoboKit 4 | 33000 руб. |
| RoboKit 5 | 41000 руб. |
| RoboKit 6 | 49000 руб. |
| Ресурсные наборы для серий RoboKit 1-6 | 8000 руб. (за 1 набор) |
Далее по списку у нас поистине роботы мечты. Серия Robotis DREAM специально заточена под среднюю школу. К сожалению, простота сборки моделей и скудный набор элементной базы ограничивает использование конструктора в старших классах. Для них лучше подойдут BIOLOID’ы, но о них чуть позже. Линейка DREAM включает в себя 4 набора с моделями различной сложности. Классной фишкой всех конструкторов от данного бренда является то, что добрая часть деталей и заклепок, которые используются при сборке - универсальные. Таким образом, наборы разных уровней при необходимости легко объединяются между собой.
class="eliadunit">
Так как комплектация коробочки каждого нового уровня достаточно сильно отличается от предыдущего, то подробно останавливаться на списке деталей смысла не вижу. Отмечу лишь, что наборы комплектуются качественными учебниками с пошаговыми уроками, в процессе которых вы можете с нуля осуществить сборку двенадцати моделей. Среда программирования для роботов весьма непривычная. Она не графическая и не текстовая, скорее смешанная. Пользователю предлагается список с готовыми конструкциями языка, перетягивая их, он формирует тело программы, которое по итогу отображается в простом текстовом редакторе.

Оставим серию DREAM и рассмотрим следующее семейство в линейке от Robotis. Конструкторы BIOLOID предназначены для эффективного обучения в области проектирования и тестирования робототехнических систем высокого уровня. Опытные робототехники оценят возможность конструирования человекоподобных моделей. Различают два возможных варианта комплектации. Первый это STEM. Он включает в себя стандартный набор элементов (standart), и при желании с лёгкостью расширяется дополнительным комплектом (expansion).
Второй вариант - Premium. По мне так это самый суровый набор из всех. При ценнике в 120000 руб. он позволяет конструировать шагающих роботов для соревнований. Кручу него только профессиональный BIOLOID GP с облегчённым каркасом. ДЖИПИ способен играть в футбол, отважно сражаться в боях с другими роботами и даже танцевать брейк-данс. Модели, созданные с помощью элементной базы GP можно увидеть на ежегодном всероссийском робототехническом фестивале «Робофест».
Для базового программирования в основном используется стандартная текстовая среда RoboPlus. Те, кто дорастает до серьёзных проектов, переходят на редактор движений RoboPlus Motion. С его помощью можно задавать сложные движения, например танцы, в среде напоминающей программу для видеомонтажа. Всё просто. Каждое движение робота - это отдельный кадр. Чем больше кадров, тем соответственно больше действий совершает наша модель. Помимо пакета программ в комплект входит руководство по программированию. Актуальные цены на продукцию линейки Robotis наглядно представлены в таблице. Кусаются, не правда ли?
| НАБОР | ЦЕНА (ИЮНЬ 2017) |
| Robotis DREAM 1-4 | 14000 руб. (за 1 набор) |
| Robotis BIOLOID STEM Standart | 38000 руб. |
| Robotis BIOLOID STEM Expansion | 29000 руб. |
| Robotis BIOLOID Premium | 126000 руб. |
| Robotis BIOLOID GP | 310000 руб. |
Перейдём к последней линейке роботов из официальной таблицы российской ассоциации образовательной робототехники. Fishertechnik - это наборы для конструирования механизмов и машин, наглядно показывающих производственные процессы. Наибольшее распространение конструктор получил в профессиональных учебных заведениях и технических ВУЗах. Наборы комплектуются фирменными контроллерами, двигателями, датчиками и блоками питания. Каждая версия конструктора содержит в коробке довольно объёмный блок-контроллер с пазами и выступом типа «ласточкин хвост».
Среда для программирования Robo Pro качественная, визуальная. Особенно придётся по вкусу тем, кто, как и я не особо фанатеет от текстового кодинга. В качестве интересной фишки разработчики встроили в прогу режим симуляции для тестирования алгоритма без реального робота. Готовые решения можно скидывать на флешку или напрямую в память контроллера через USB. Наборы которые можно использовать в робототехнических кружках комплектуются рабочими тетрадями с примерами собранных моделей.
Из всех наборов Fishertechnik’а мне больше всего нравится «Первооткрыватель». В комплект входит цветная видеокамера и wifi модуль для удалённого управления собранным роботом. Огорчает то, что многие хорошие наборы были сняты с производства. Например, популярный комплект ROBO TX Учебная Лаборатория. Проанализировать цены на все наборы возможным не представляется. Их реально очень много и они разные. На официальном сайте есть даже набор для сборки 3D принтера. Мы ещё в прошлом году купили для своей площадки аналогичный. Рекомендую. На таком принтере очень удобно печатать дополнительные пластиковые детали для любых конструкторов.

На этом можно было бы завершить наш обзор, ведь все виды роботов из официальной таблицы российской ассоциации образовательной робототехники мы рассмотрели. Однако в последнее время на рынке с невероятной скоростью появляются новые конструкторы, и привычная табличка постепенно устаревает. Поэтому в качестве небольшого бонуса я расскажу вам ещё про парочку любопытных робоплатформ, как зарубежных, так и отечественного производства. И начнем, пожалуй, с наборов Vex.
Данный конструктор пока не получил широкого распространения в России. В первую очередь это связано с тем, что VEX’овским наборам трудно тягаться с методической базой разработанных уроков под LEGO. Однако хочу заметить, что комплекты для робототехнических классов VEX EDR являются достойными конкурентами не только для EVE3, но и для TETRIX’а. Так например серия IQ, в которой подавляющее большинство деталей выполнены из пластика, имеет уникальную систему сборки конструкций и комплектуется фирменными микроконтроллером.
Наборы VEX EDR состоят из перфорированных металлических элементов. Отличительной особенностью данной линейки является наличие в микроконтроллере портов аналогового и цифрового типа. Это позволяет использовать конструктор для изучения базовых элементов микроэлектронники. Программное обеспечение для EDR представлено в виде трёх пакетов: MPLAB, easyC и ROBOTC. На практике же в качестве основной платформы используют, как правило, только последнюю, наиболее универсальную среду ROBOTC.

Далее по списку у нас наборы Makeblock. Мэйкблок - это открытая платформа, которая позволяет собирать различные робототехнические модели из алюминиевых деталей. Фирменные цвета, используемые производителем для окрашивания реек – светло-голубой и золотистый. Основной фичей данного конструктора является совместимость микроконтроллера с элементной базой от LEGO и Arduino. Данный факт не может не радовать обладателей данных наборов.
Для создания программ можно выбрать наиболее подходящую вам среду. Первая - это визуальная объектно-ориентированная среда MBlock, работающая по принципу drag-and-drop. То есть просто перетаскиваете блоки в основное окно, попутно составляя алгоритм. В основном используется для изучения основ программирования в начальной школе. Вторая – интегрированная среда разработки Arduino IDE. Там уже всё намного сложнее. Никаких картинок. Команды прописываются ручками.

Что ж друзья. Вот мы и добрались до последней робототехнической платформы в нашем небольшом обзоре. Отечественные наборы конструктора ТРИК разрабатывались командой опытнейших инженеров из Санкт-Петербурга. Создатели утверждают, что с помощью их конструктора можно собирать модели различной сложности: от самых простеньких до человекоподобных. Сердцем ТРИК’а является уникальный микроконтроллер, способный обрабатывать аудио и видеосигнал, осуществлять управление моторчиками и анализировать показания датчиков.
Для программирования автономных моделей можно использовать любой популярный язык: С++, Java, Python и т.д. Для юных робототехников разработчики предусмотрели визуальную среду TRIK Studio. Она интуитивно понятна любому ребёнку и позволяет описывать поведение моделей при помощи логической последовательности изображений. Конструктор распространяется в различных комплектациях. Каждый сможет найти себе вариант по душе. Малый образовательный набор можно заказать в пределах 500000 рублей, тогда как ценник на лакшери вариант выходит далеко за сотню.
Можно с гордостью сказать, что на сегодняшний день отечественный ТРИК представляет собой не просто игрушку для баловства. Это солидный набор для создания прототипов роботов любого уровня, с каждый днём набирающий всё большую популярность. И не удивительно. Ведь за приемлемую цену вы получаете добротный «скелет» из металла, базовые приводы и всевозможные сенсоры. Даже базовые наборы имеют в своём составе помимо контроллера камеру и микрофон. Все эти качества позволяют создавать роботов способных наиболее эффективно взаимодействовать с внешней средой.

На этой ноте мы завершаем обзор робототехнических платформ для использования в образовательных учреждениях. Давайте кратенько подведём итоги и сделаем выводы на основании анализа наборов популярных конструкторов.
Из всех представленных на сегодняшний день робототехнических комплексов наибольшую известность имеет, конечно же, LEGO. Помимо маркетинговой составляющей данная платформа хороша своей систематизацией. Всё железо согласовано с программным обеспечением, по работе с которым в свою очередь разработаны качественные методическими материалами. Существует даже образовательная академия LEGO Education. На сайте представлены различные курсы и тренинги. Регулярно проводятся мастер-классы. Видно, что уровень действительно серьёзный.
Да, тот же ТРИК может конкурировать с LEGO в плане железа. У отечественной разработки навороченный контроллер, двигатели и т.д. Но вот в плане программного обеспечения и согласованной с ним методической базы ТРИК пока сильно отстаёт. Опять же по уровню сложности российский конструктор ближе к уровню Arduino и Raspberry Pi. Для начинающих он плохо подходит. Почему спрашивается? Тут нужно разобраться, чем же вообще отличается та же Arduino от LEGO.

Если кратко, то в EVE3 вы просто берёте контроллер, который уже имеет и экран и кнопки и соответствующие порты. Подключаете нужный двигатель и датчики. А затем заливаете на него программу, написанную в интуитивно понятной графической среде. Всё просто как дважды два. Открытая же платформа, например, на базе Arduino подразумевает, что вы собираете этот контроллер самостоятельно. Выбираете плату, затем экранчик, набор кнопок и т.д. Именно поэтому, основной упор в робототехнических кружках, функционирующих на базе ВУЗов и ССУЗов, делается на конструировании с использованием одноплатных компьютеров.
Наша площадка не исключение. Тем, кто уже освоил базовые и ресурсные наборы от Lego, мы предлагаем попробовать свои силы в работе над серьёзными проектами в области робототехники. Так студенты старших курсов активно занимаются изучением Arduino-подобных конструкторов Йодо и Амперка. Наиболее сообразительные впоследствии выходят на уровень разработки собственных прикладных устройств без использования робототехнических конструкторов.
Например, сейчас ведётся разработка уникальной системы контроля доступа и учета рабочего времени. В её основе как раз будет микроконтроллер на базе Raspberry Pi. Про эту систему и про другие интересные проекты мы более подробно поговорим в следующих выпусках. Ну а на сегодня это всё. С вами был Денис Курец. Специально для Республиканской площадки развития образовательной робототехники «Russian Robotics» в ГПОУ «ВПТ». Не забываем ставить палец вверх и делиться этим материалом со своими друзьями. Увидимся в следующем выпуске. Всем пока.
class="eliadunit">Один из вариантов создания роботов на основе Arduino и других компьютерных плат — использование готовых корпусов и разработка собственной начинки. На рынке можно найти достаточное количество таких каркасов, которые включают также механическую базу (колеса, гусеницы, шарниры и т.п.). Взяв готовый корпус, вы сможете целиком сосредоточиться на программировании робота. Предлагаем небольшой обзор таких корпусов-скелетов роботов.
Создание робота — процесс многоэтапный, включающий в себя и проектирование, и сборку, и программирование. Знания робототехники граничат с физикой, механикой, алгоритмизацией. Начинающие юные робототехники по разному тяготеют к каждому из этапов создания роботов. Кому-то легче дается создание механических частей робота, но программирование вызывает сложности. Кто-то, наоборот, с легкостью программирует логику поведения робота, но процесс создания механической модели вызывает сложности.
Тем, кому процесс проектирования механики дается с трудом, и больше заводит именно процесс подбора различных датчиков и проектирование логики робота, стоит обратить внимание на различные механические базы для построения роботов. Они продаются без электроники, по сути это корпус или скелет будущего робота. Осталось только добавить им «мозг» (например, плату Arduino ), нервы и мышцы (датчики и приводы) и оживить их (запрограммировать). Иногда такие корпуса даже содержат моторы или датчики.
Платформа на колесах — это, безусловно самая простая и эффективная база для построения робота. В продаже есть много различных заготовок такого типа. Некоторые из их:
Платформа для создания робота на Arduino, выполненная из алюминиевого сплава. Платформа оснащена 4 колесами, к каждому из которых подключен отдельный мотор. Моторы идут в комплекте. Платформа может использоваться как основа автомобиля или любого другого ездящего робота. Размер платформы около 20 на 20 см. Винты, гайки и провода для подключения моторов также в комплекте.
Такое основание для вашего будущего робота можно купить примерно за $75 на сайте интернет-магазина DX.com .
Еще одна четырехколесная платформа для создания робота на базе Arduino привлекает внимание своими колесами. Они имеют диаметр 80 мм, ширину 60 мм, выглядят элегантно и надежно. У этой платформы акриловое основание толщиной 1,5 мм. Корпус имеет хорошую устойчивость и подходит для создания быстро передвигающегося робота. Aliexpress продает этот робот-скелет за $60. Комплектация аналогичная предыдущей — колеса, двигатели, провода и винты уже есть в наборе.

В следующей трехколесной платформе для создания робота на базе Arduino моторы подключены только к двум колесам и это снижает стоимость. В интернет магазине DX.com такое шасси продается за $20,5. Основание выполнено из прозрачного акрила. В комплекте 2 мотора, винты, гайки, провода, батарейный блок для 4 АА батарей. Размеры примерно 20 на 10 см.

Трехколесной платформе для робота Arduino. Фото dx.com

Двухколесное основание для робота. Фото dx.com
Гусеничные шасси более устойчивые чем те, что на колесах. Плюс в такой конструкции достаточно всего двух моторов, чтобы привести систему в движение, — а значит цена будет ниже, чем у четырехколесных платформ. Самая распространенная модель на гусеницах — это, конечно, танк, однако такая база может стать платформой для робота любой формы.
Гусеничное шасси для создания робота-танка на базе Arduino. В комплекте 2 мотора, гусеничная передача, винты, гайки. Размеры этого шасси 18,7 см х 11,5 см х 4,3 см. В интернет-магазине DX.com такое гусеничное шасси стоит $42.

Гусеничное шасси для робота. Фото dx.com
Паук — достаточно популярная форма роботов, поэтому в продаже имеются и такие корпуса-скелеты.Конструкция паука в отличие от роботов на колесах предусматривает движение в любую сторону.
Первый паук а в нашем обзоре стоит около $100 на Aliexpress .

Корпус для робота паука. Фото: aliexpress.com
В комплекте этого корпуса нет электроники, сервоприводов, их нужно покупать отдельно. С данной моделью паука рекомендовано использовать сервопривод MG 995 Servo. Забавно, что такой привод на сайте Aliexpress можно купить как за 33 доллара, так и за за 5 долларов (правда в этом случае придется купить 10 штук). Привод нужен под каждую лапу.
Кроме того для управления большим количеством сервоприводов потребуется многоканальный контроллер управления сервоприводами . Итоговая стоимость паука может получиться достаточно высокой.
Еще один скелет шестиногого робота-паука или даже робота-таракана привлек мое внимание своей ценой в $ 42,5. Робот на шести металлических лапах должен получиться пусть и не очень маневренный, зато устойчивый. Скелет этого таракана имеет длину 24 см, ширину — 18 см, высоту — 12 см. Приобрести этого черного таракана-робота можно на сайте интернет-магазина Aliexpress.

Корпус для робота таракана. Фото: aliexpress.com
Достаточно интересной кажется модель робота-гуманоида стоимостью около $ 105. Здесь также нет электроники, зато много простора для творчества. Создание робота-гуманоида и программирование человеческой походки — непростые и интересные задачи. Начать пробовать свои силы в самостоятельном создании робота-гуманоида можно с покупки такого скелета на сайте интернет-магазина Aliexpress. Если верить описанию производителя, то на основе этого карскаса можно сделать даже танцующего робота.

Оболочка для робота гуманоида. Фото: aliexpress.com
Готовые полнокомплектые роботы на базе платы Arduino подойдут и для тех, кого электрические схемы не особо привлекают. Приобретая работающую модель робота, т.е. фактически готовую высокотехнологичную игрушку, можно разбудить интерес к самостоятельному проектированию и робототехнике. Открытость платформы Arduino позволяет из одних и тех же составных частей мастерить себе новые игрушки. Цена таких роботов колеблется в районе $ 100, что в общем относительно немного.
Готовые корпуса , которые мы рассмотрели в этом обзоре, предполагают бОльшую фантазию и бОльшее разнообразие получаемых роботов. В них вы не ограничены платами Arduino, можно использовать и другие «мозги». Преимущество этого способа перед созданием робота с нуля в том, что вы можете не отвлекаться на поиск материалов и разработку конструкций. Такой робот выглядит вполне серьезно и походит на промышленного.
Самым интересным, но и самым сложным, на наш взгляд, является полностью самостоятельное создание робота . Разработка корпуса из подручных материалов, приспособление для этих целей игрушечных машинок, и другой отслужившей техники может стать не менее увлекательным, чем программирование поведения робота. Да и результат будет совершенно уникальным.
Если вы только начинаете изучение Arduino робототехники, рекомендуем наш курс
Все цены приведены по состоянию на 22.05.14.
Номинальное напряжение одного литий-ионного элемента 18650 составляет 3,6-3,7 В. Полностью заряженный элемент выдаёт 4,1-4,2 В. А вот с минимальным напряжением сложнее – конечное напряжение разряда зависит от типа аккумулятора и эта цифра может колебаться в пределах 2,6-3,2 В. Разрядить можно и ниже, но это верный путь к быстрой деградации элемента питания. Я решил загрубить оценку выдаваемого аккумулятором напряжения диапазоном номинал-максимум. Тогда получается, что сборки из двух, трёх и четырёх последовательных аккумуляторов дают нам диапазоны 7,2-8,4 В, 10,8-12,6 В, 14,4-16,8 В. От такой сборки нам нужно получить два напряжения – какое-то напряжение для питания двигателей и 5 В для питания электроники. Сборкой из двух аккумуляторов можно запитать двигатели на 6 В, использовав понижающий DC/DC преобразователь, но разница между минимальным значением напряжения (при разрядке аккумуляторной батареи до номинала это будет 7,2 В) и 6 В будет порядка 1,2 В, что может быть недостаточно для стабильной работы понижающего DC/DC преобразователя – во избежание проблем, необходимо иметь разницу напряжений между его входом и выходом не менее 2 В (на самом деле может быть и меньше для low dropout преобразователей, но на них не будем ориентироваться). Нам вполне подходит сборка из трёх элементов, необходимые напряжения мы получим путём применения понижающих DC/DC преобразователей. Двигатели можно запитать и на 9 В, тогда в худшем случае мы получим разницу 1,8 В, что должно быть вполне достаточно. Сборка из четырёх элементов так же подойдёт, но нужно понимать, что дополнительный аккумулятор – это лишний вес и занимаемое место, хотя и большая энергоёмкость всей батареи.
Второй путь организации питания – использовать параллельные соединения тех же аккумуляторов и повышающий DC/DC преобразователь. Тогда с 3,6-4,2 В напряжение можно повысить до 5 В для электроники и до 6-9 В для двигателей. Кажется, что ёмкость такой аккумуляторной сборки легко варьировать путём добавления новых элементов, однако не стоит забывать, что используемые аккумуляторы должны иметь схожие ёмкость и внутреннее сопротивление.
Для зарядки/разрядки последовательных или параллельных аккумуляторных батарей существуют специальные платы-контроллеры. Контроллеры защиты защищают аккумуляторную сборку от чрезмерного заряда или разряда (контроль напряжения), короткого замыкания, превышения допустимого тока разряда. При использовании таких простых плат, требуется внешний источник питания с ограничением зарядного тока. Контроллеры заряда/разряда самостоятельно умеют заряжать аккумуляторы по методу cc/cv с ограничением зарядного тока. Продвинутые контроллеры для последовательного соединения аккумуляторов так же могут обеспечивать индивидуальный заряд для каждого аккумулятора – производят балансировку элементов аккумуляторной батареи.
Я выбрал последовательную схему соединения аккумуляторов с использованием платы защиты и внешним зарядным устройством. В будущем такую простую плату контроля можно заменить на контроллер заряда с балансировкой. Хотя, при параллельном соединении балансировка не требуется, нужно учитывать, что при сильном износе какого-то одного аккумулятора, контроллер обнаружить это не сможет и это может быть чем-то чревато. Стоит учитывать также тот факт, что режимы работы каждого аккумулятора будут другие. Например, при съёме одной и той же мощности, аккумуляторам при параллельном соединении придётся отдавать бóльший ток, чем при параллельном соединении.
Следовательно, подойдут двигатели с номинальным напряжением 6 В и рабочим диапазоном 3-9 В. Я выбрал двигатель со скоростью 281 об/мин и потреблением, в режиме холостого хода, 80 мА. Под нагрузкой скорость проседает до 238 об/мин, ток возрастает до 380 мА, при этом двигатель выдаёт мощность в 2 Вт и развивает крутящий момент в 0,5 кг*см. При стопоре двигателя крутящий момент возрастает до 4 кг*см, а ток до 900 мА. Все эти характеристики были взяты из таблички, выложенной на сайте одного из продавцов товара, так как нормального «даташита» мне найти не удалось.

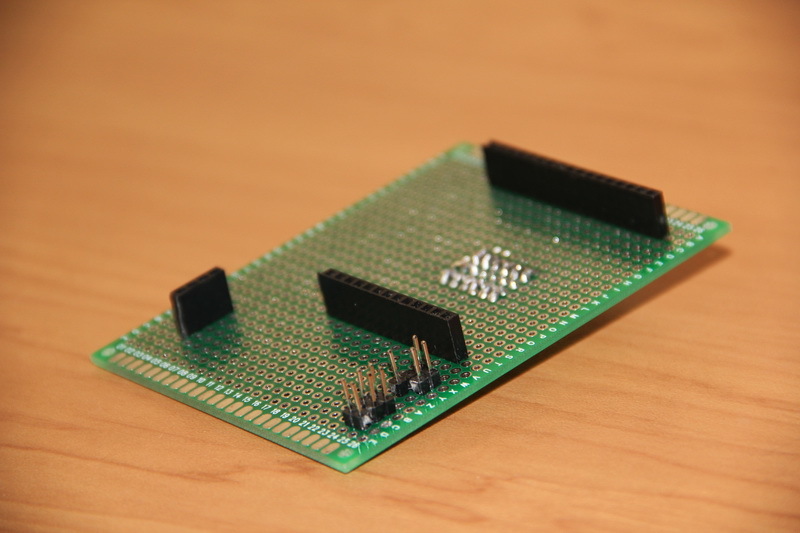
Если посмотреть на фотографию, то можно увидеть шлицы на валах, выступающих из двигателей. Для этих двигателей был найден комплект муфт и колёс.

Колеса диаметром 80 мм, резина мягкая, шипованная.


Само основание я собирался изготовить из широких алюминиевых уголков (или чего-то подобного что можно найти в строительных магазинах) с помощью которых сделать «бортовой» каркас, который закрыть какими-то легкими, прочными, металлическими пластинами. В нужных местах сверлятся отверстия и нарезается резьба по мере необходимости. Однако сначала я решил поискать что может предложить китайская промышленность. И нашел кит - комплект шасси для конструирования робота, который содержал в себе сам корпус, вышеупомянутые двигатели, муфты и колёса, а также батарейный отсек для батареек AA, переключатель питания, гнездо питания и крепёж. Сам корпус имеет множество отверстий, что по логике делает его легче и их наличие должно минимизировать объём слесарных работ.


Прикинув размеры и объём внутреннего пространства (параллельно выбиралась электроника для платформы, которая и должна была поместиться в этот корпус), я заказал этот кит. На пришедших двигателях, как можно видеть выше, почему-то написано JGA25-370-9v-281rpm. Почему именно 9v, когда номиналом этой подгруппы является 6 В, я не понял, но, наверное, китайцам виднее, что писать, чтобы лучше продавалось.
Сам корпус весит почти 400 граммов. Из какого материала он изготовлен, затрудняюсь ответить, но на чистый алюминий непохож.




Снимаем крышку и устанавливаем двигатели. Отверстия под двигатели имеют диаметр как раз под винты М3, не оставлено никакого запаса на юстировку положения, но, надо отдать должное, это не доставило проблем - отверстия четко совпадают с резьбой на корпусе двигателей.



Устанавливаем муфты.


И прикручиваем колёса.


Получилась готовая платформа с дорожным просветом порядка 23 мм.

Вес «холостого» шасси составил чуть больше килограмма. Помните картинки с замером массы отдельных деталей? 393+(58+85+20)*4 = 1045 граммов. Всё в сборе весит 1057 граммов. 12 граммов добавили 16 болтиков.

Вот такая получилась, вполне симпатичная, платформа.

Я трачу достаточно много времени в пути на работу. Вообще говоря, при правильном подходе, далекую дорогу можно обратить в плюс, читая книги, смотря/слушая научно-популярные программы или аудиокниги, которые бы никогда не прочитал, не послушал и не посмотрел. Именно благодаря таким вот условиям, я стал фанатом и отслушал все рассказы Модели для сборки (чтобы не было вопросов в комментариях - ). Роботоблудие не стало исключением и принципиальную схему платформы я продумал и нарисовал в дороге .
Схема нарисована в OneNote. Картинка кликабельна. Да, мне стыдно – принципиальная схема выглядит непринципиально. Последние три недели я никак не могу уделить время на доводку статьи и уже встал вопрос – публиковать вообще что-то или отложить «на потом». Решил опубликовать так, иначе «на потом» может быть чревато. Нарисую нормальные схемы – заменю картинки. С другой стороны, такое оформление выглядит в стиле оригинального DIY. На работе или дома, когда формируется какая-то идея сначала берётся обычный лист бумаги и обычный карандаш…
Давайте посмотрим по принципиальной схеме, что и с чем у нас будет соединяться. К контроллеру литий-ионных аккумуляторов D1 подключаются три аккумулятора формата 18650. У всей схемы «общая земля», которой и подключен выход P- контроллера D1. Выход P+, через предохранитель FU1 и выключатель SW, подключен к входам DC/DC преобразователей D3 и D4. Преобразователь D3 формирует напряжение для двигателей, D4 – для питания всей электроники. Выходы этих преобразователей подключены к драйверу двигателей D5, к которому подключены двигатели. К каналу МА подключены двигатели ML1, ML2 левого борта, а к MB – MR1, MR2 правого борта. Драйвер двухканальный, это значит, что можно будет управлять двумя группами двигателей (каналы А и В), но не индивидуально каждым двигателем. Для управления скоростью и направлением вращения двигателей предназначены порты ENA, ENB, IN1-IN4. Резистивная цепочка, формирующая напряжение Vbat’ подобрана так, чтобы сформировать в диапазоне 0…5 В телеметрию напряжения Vbat аккумуляторного блока. Если Vbat = 13 В (чего не должно быть, так как аккумуляторный блок может выдать максимум 12,6В, но я немного перестраховался), то Vbat’ = 3,94 В (то есть значение гарантированно не выйдет за предел 5 В). Ток, протекающий через резистивную цепочку при 12 В будет равен 3,6 мА, и эти потери я посчитал допустимыми (порядка 0,1% при ёмкости аккумуляторной батареи 3000 мАч). К входу контроллера D1 подключается гнездо для подачи внешнего питания. Но, мы видим по схеме, что оно подключено через реле D2.
Сначала хочу пояснить наличие резистора 10 кОм, подтягивающего один из выводов в разъёме питания к напряжению 5 В. Разъём питания у нас с тремя выходами. Пара выходов передают напряжение источника питания. Третий выход является информационным. Он замкнут на отрицательный выход (он у нас подключен к «земле»), если штекера в гнезде нет и размыкается, если штекер вставлен в гнездо. Таким образом, мы получаем сигнал телеметрии Vinon’ о подключении источника питания: если напряжение Vinon’ = 0, то внешнее питание не подключено, если Vinon’ = 5 В – подключено. Резистор 10 кОм подтягивает этот выход к 5 В. При подключении штекера через резистор будет протекать ток 0,5 мА, что вполне приемлемо.
При подключении внешнего источника через нормально-замкнутое реле D2 и предохранитель FU1 аккумуляторы начнут заряжаться. Нормально-замкнутое реле – это значит – его выводы всегда замкнуты и размыкаются только при подаче напряжения на управляющий контакт. Зачем реле D2? Допустим, у нас нет этого реле. Если блок питания подключили к платформе, но забыли его включить в розетку – как плата микроконтроллера узнает - заряжается сейчас аккумуляторный блок или нет? А, если источник питания включен в розетку, но не выдаёт напряжение? Или всё работает, но источник питания выдаёт только 10В вместо положенных 12В? А, если я такой источник (который только 10 В выдаёт) подключил к аккумуляторной батарее, которая еще не разряжена до конца и выдаёт 11 В, то как я узнаю – эти 11 В формирует аккумуляторный блок (который на самом деле выше 10В не выдаёт) или внешний источник? Для таких ситуаций и был продуман алгоритм, для которого потребовалось реле. О подключении внешнего источника питания мы узнаем по телеметрии Vinon’. Отключаем реле и смотрим на телеметрию Vin’. Если она устраивает и это напряжение находится в ожидаемом диапазоне, то включаем реле и сигнализируем о процессе заряда. Если не устраивает – не включаем реле и сигнализируем о неисправности. Процессом анализа и индикации пусть занимается бортовая плата управления, а не платформа. Для этого мы передадим ей все необходимые напряжения и сигнал управления для реле Vinoff’. Управляющий вход модуля реле через резистор 10 кОм подтягиваем к 5 В, обеспечивая постоянное включение реле. При подаче 0 В на этот вход реле отключится.
Но почему, именно, допотопное механическое реле? Ведь можно поставить MOSFET транзистор. Такая идея была, но от неё пришлось отказаться. Современные МДП транзисторы обладают низким сопротивлением (десятки миллиом) в открытом состоянии и при протекании тока в 2-5 А на нём не будет сильно значимого падения напряжения и, как следствие, нагрева – небольшую мощность способен рассеять сам корпус транзистора даже без радиатора. Но это всё касается схемы, в которой такой цифровой ключ будет управлять подключением источника питания к пассивной нагрузке. Мы же ставим транзистор между двумя источниками, в результате чего разница напряжений между стоком и истоком может быть существенна, что будет приводить к повышенному тепловыделению и транзистор будет сильно греться. Так же, для открытия или запирания транзистора нужно будет делать цепь управления (драйвер), потому что уровень управляющего напряжения от платы микроконтроллера 5 В, что недостаточно для создания разницы напряжения затвор-исток для управления транзистором (для управления транзистором, например, IRFZ44N нам придётся подать на его затвор 8-12 В для того, чтобы его открыть). То ли дело – готовый модуль реле, который надо просто подключить и который, если уж замкнут, то гарантированно соединяет выход с входом без всяких заморочек.
Таким образом, у нас получилась не просто коммутационная плата, а полноценная плата питания. На плате устанавливаются DC/DC преобразователи, резистивные цепочки, предохранитель и куча разъёмов для подключения электроники. Структурно можно выделить два разъёма. Разъём CON1, к которому будут подключаться батарейный блок, переключатель/кнопка питания, разъём питания, модуль реле, двигатели, плата драйвера двигателей – вся периферия внутри платформы. И разъём CON2, назначение которого – соединение с платой управления. На этот разъём выводятся сигналы телеметрии и управления, напряжения 5 В, а также полезно «прокинуть» напряжение с аккумуляторного блока Vbat – мы даём возможность «уровнем выше» организовать свои каналы питания с различными напряжениями, например, 6 В для питания сервоприводов.
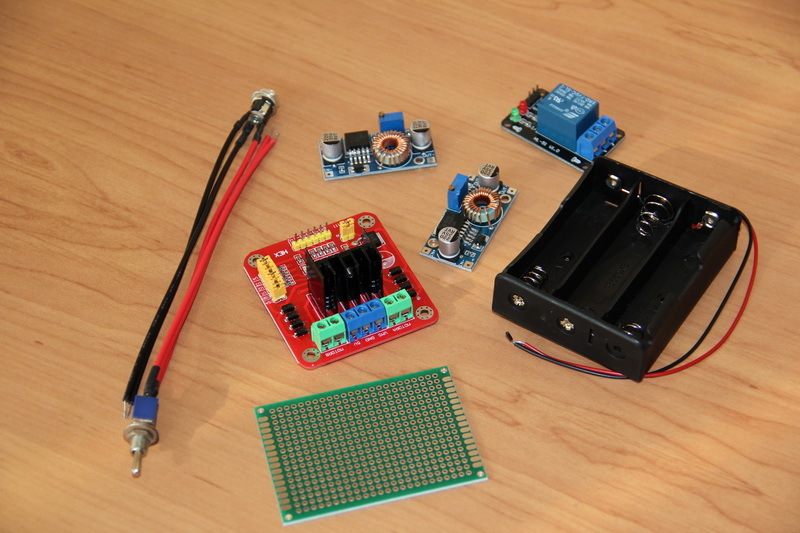
Гнездо питания с тумблером пошли в дело из полученного комплекта шасси. Были выбраны и приобретены драйвер для двигателей на базе микросхемы L298N, платы DC/DC преобразователей XL4005, безымянный модуль реле, батарейный отсек и монтажная плата размерами 50х70 мм и шагом отверстий 2,54 мм.
Помимо этого, нам ещё понадобятся следующие материалы.

Вверху фотографии можно увидеть несколько длинных штыревых разъёмов с шагом 2,54 мм, а также гнёзд, ниже – металлические контакты на кабель, левее – гнёзда для них, справа – винты, гайки и шайбы М2. Разъёмы на плату и кабель в разных магазинах называются по-разному. В силу исторических причин я называю штыревые разъёмы для платы PLS, гнёзда на плату – PBS, разъёмы на кабель – BLS. В интернете на заграничных сайтах такие разъёмы ищутся по запросу вида «2.54mm connector» или «dupont connector». Помимо этого, потребуется различный расходный материал – припой, флюс, провода и так далее, а также набор ручных инструментов – кусачки, пинцет, отвёртки и прочее – всё это обычно есть у тех, кто хоть как-то занимается DIY (Do It Yourself – сделай это сам).
Прежде, чем заказать электронику и корпус, я прикинул - выбранная электроника должна без проблем уместиться во внутреннем пространстве. Наступило время это проверить: расставляем электронику и отмечаем будущие посадочные места.

Теперь примемся за подготовку плат.
Начал я с аккумуляторного блока. Контроллер литий-ионных аккумуляторов был «посажен» на термоклей и к нему припаяны выводы контактов в соответствии с принципиальной схемой. Я думаю, читателям будет интересно, что и каким инструментом делалось, поэтому в конце статьи, под спойлером, я разместил картинки некоторого используемого оборудования со своими краткими комментариями. Термоклей наносился с помощью термопистолета. Однако, перед этим мне пришлось провести работу по, так скажем, повышению надежности этого отсека. Предупрежу всех, кто соберётся что-то делать – лучше не допускать моей ошибки и взять более прочные батарейные отсеки. Одно время я никак не мог найти такие отсеки в розницу и когда нашёл, то набрал их немало на радостях по простоте душевной. А с ними всё не так просто. Потому что в этом отсеке аккумуляторы с плоскими, невыступающими плюсовыми площадками просто не достают до контакта. Кроме этого, все подпружиненные контакты вращаются, контакт плохой. Поэтому пришлось ввернуть болтики М2, откусить лишнее, навернуть гайки и затянуть для улучшения контакта. Но мне этого показалось мало, и я ещё и хорошенько пропаял все соединения. Потому что, если что-то делается, то это должно быть надёжно, чтобы это в будущем не доставляло проблем и к этому потом не возвращаться снова.
Следует заметить, что для литий-ионных аккумуляторов используется обычный контроллер без балансировки. Это значит, что при заряде одного из трёх аккумуляторов, контроллер наверняка прервёт заряд всех аккумуляторов. Фактически – это просто плата защиты от низкого разряда и перезаряда аккумуляторных батарей и контролем тока разряда. Поэтому желательно использовать аккумуляторы с одинаковой реальной ёмкостью. Если использовать контроллер с балансировкой, то подбор по ёмкости менее критичен и аккумуляторные батареи будут использоваться более эффективно, но такие контроллеры стоят дороже и занимают побольше места. Как же подобрать аккумуляторные батареи с одинаковой реальной ёмкостью? Ведь, купив одинаковые аккумуляторы из одной и той же серии даже от брендов, ёмкость может различаться на 5-10%, а китайские аккумуляторы с надписями 6000-8000 мАч, вообще, представляют собой аккумуляторы с неизвестной ёмкостью. Для замера реальных ёмкостей я использовал довольно популярное в своей среде зарядное устройство OPUS BT-C3100. С помощью него было проверено 12 приобретённых аккумуляторов и отобраны три, разброс ёмкостей которых минимален и не превышает нескольких процентов. Ёмкость аккумуляторов LG LGABC21865 была заявлена в 2800 мАч, но в реальности колебалась в диапазоне 2400-2500 мАч (тестировал на токе 700 мА).
Небольшое отступление в виде размышления. Зарядное устройство посчитало нам ёмкость аккумуляторов с учётом их заряда до 4,2 В и разряда, если я не ошибаюсь для OPUS BT-C3100, до 2,8 В. У нас же аккумуляторы не должны разряжаться меньше номинала в 3,5-3,7 В. То есть, наша рабочая ёмкость батарей сильно ниже измеренной. Это нужно учитывать. Возможно, в будущем, стоит подумать об аккумуляторном блоке из четырёх аккумуляторов. А можно ли будет просто заменить аккумуляторный блок и блок питания для его заряда? Давайте прикинем. У нас получится диапазон напряжений 14,4-16,8 В. Преобразователи напряжения работают с входным напряжением до 32 В. Резистивные делители нам дадут диапазон напряжений сигналов телеметрии 4,3-5,1 В, что немного выходит за верхний диапазон 0-5 В. Но это можно парировать на уровне платы управления – если напряжение телеметрии 5 В, то аккумуляторный блок через некоторое время будет почти заряжен. С другой стороны, если понизить напряжение на двигатели до 6-7 В, можно сильнее разряжать имеющийся аккумуляторный блок и более эффективно использовать аккумуляторные батареи – в этом случае нужно будет только лишь подстроить один преобразователь напряжения. На первый взгляд, есть простор для будущих исследований вообще без изменения аппаратной части, а уж, как именно интерпретировать сигналы телеметрии в зависимости от установленного аккумуляторного блока – это пусть решается на уровне платы управления, то есть, пока об этом можно не думать.
Выходные провода с получившегося аккумуляторного блока я зачистил специальными клещами (стриппер) и обжал в металлические контакты, используя обжимные клещи (кримпер), для надёжности пропаял и надел на них пластиковые корпуса, получив BLS разъёмы. При пайке использовалась паяльная станция, в качестве припоя – ПОС-61 без канифоли, в качестве флюса – безотмывочный FluxPlus NC-D500.



После сборки аккумуляторного блока и установки в него аккумуляторных батарей, он выдавать ничего не будет. Так устроены многие контроллеры литий-ионных батарей – они обесточивают нагрузку при коротком замыкании, сильном разряде, превышении разрядного тока. Для того, чтобы «сбросить» защиту и привести аккумуляторный блок в рабочий вид его нужно подать 12-12,6 В на контакты +P/-P. Тоже самое надо сделать после первого подсоединения аккумуляторных батарей к контроллеру. После этого можно убедиться, что блок выдаёт напряжение, если аккумуляторы правильно подсоединены к контроллеру.
Для заряда подобных сборок аккумуляторов существуют блоки питания с выходным напряжением 12,6 В (3х4,2 В). С таким блоком питания аккумуляторы будут использоваться более эффективно, хотя можно использовать и источники питания номиналом 12 В. У меня уже имеется такой блок питания с выходом 12,6 В и током 5 А. Если же подобный источник будет приобретаться, то стоит убедиться соответствует ли он заявляемым характеристикам. Простейшая проверка – проверка нагрузочной способности. Для этого я использовал керамические резисторы номиналом 1 Ом 10 Вт и 4,7 Ом 10 Вт. Собрав из таких резисторов сборку сопротивлением 2,5 Ом, я подключил к ней блок питания и замерил напряжение на его выходе. При расчётном токе в 12,6/2,5 = 5 А мой блок питания выдавал 12,6 В – это отличный результат. Китайские блоки питания, на которых написано нечто, типа – 12V3А, нередко начинают «проседать» на 10-20% при нагрузке всего около 1 А.


По аналогии были подготовлены переключатель и гнездо питания.

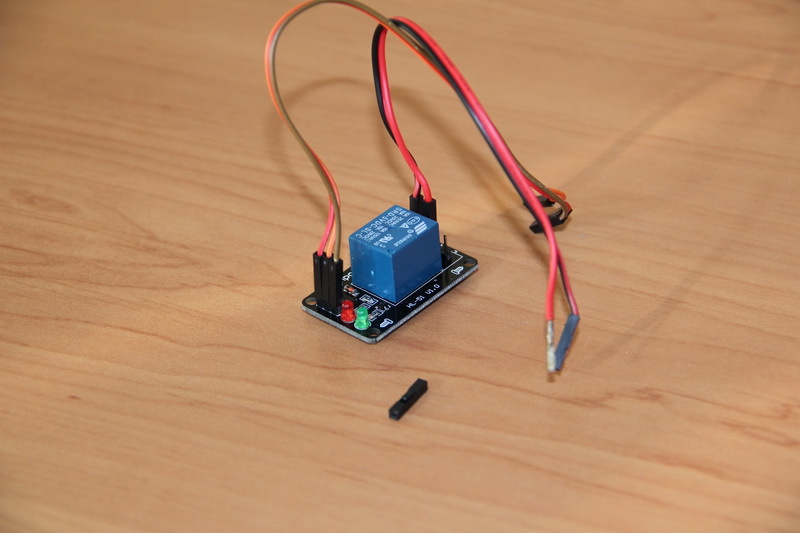
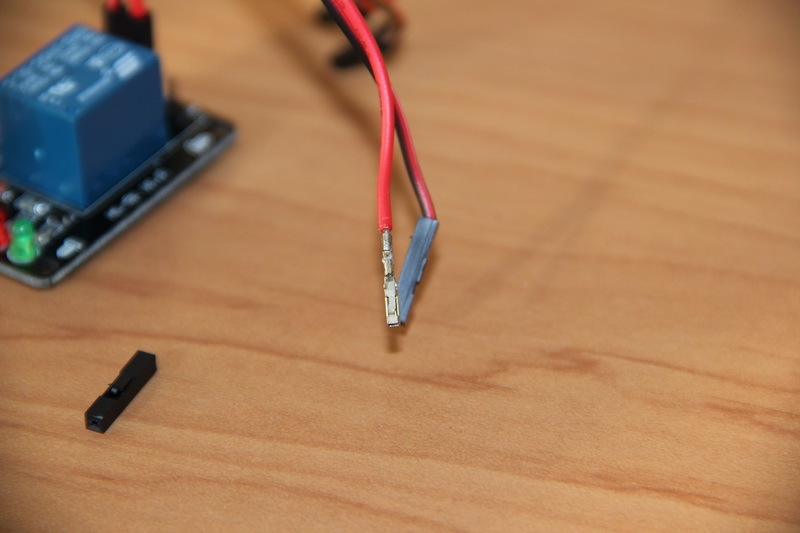
С модуля реле с помощью фена была снята клеммная колодка и припаяны PLS контакты. Для подключения этого модуля к плате питания я изготовил провода – зачистил, обжал и пропаял провода питания (через которые будет соединяться разъём питания и аккумуляторный блок) сечением 18-20 AWG. А для управления использовал имеющиеся у меня провода, с более тонкими жилами, которые легко ищутся по названию «Dupont».
То же самое было проделано с драйвером двигателей.


На DC/DC преобразователи были напаяны «ножки». Стоит упомянуть, что эти контакты сделаны из такого металла, который хорошо паяется только активным флюсом. Тогда вместо FluxPlus я использую ЛТИ-120 с последующим протиранием мест пайки тряпочкой, смоченной изопропанолом, для удаления остатков флюса.

Теперь изготавливаем нашу плату с электроникой. Для начала неплохо представить себе в целом как и что будет соединяться на плате. То есть попробовать нарисовать монтажную плату.
[Плата питания]

Догадайтесь, где я придумывал и «вылизывал» эту плату? Мы видим два разъёма на плате, два преобразователя напряжения. Появился дополнительный джампер (снимаемая перемычка), который можно установить, исключив предохранитель из электрической схемы – я это сделал специально из-за банального отсутствия предохранителя на момент изготовления платы.
Распайка платы – работа довольно нудная и кропотливая. Для питания я использовал провода сечением 18-20 AWG, для остальных сигналов - 26-30 AWG. Почему именно макетная плата и морока с проводками? Потому что у нас ещё только первый прототип. Что-то может меняться, поэтому перепаять проводки проще, чем резать дорожки и напаивать всякие перемычки на готовой печатной плате. Сделать печатную плату нужно время – развести, сделать маску, протравить, рассверлить, залудить, распаять – вряд ли для этого потребуется меньше времени, чем изготовить плату с «проводками». Хотя печатная плата будет надёжнее, а выглядеть - профессиональнее.
Из этих же соображений не распаиваются на плате модули DC/DC преобразователей, а выполняются в виде съемных модулей, в идеале, после первичной отладки, их надо дополнительно скрепить с разъёмом, например, капнув термоклея. Неплохо таким же способом увеличить надежность соединения всех разъёмов. Но, пока у нас прототип, нам удобнее делать всё съёмным, чтобы в процессе будущей отладки иметь свободный доступ к любому важному узлу и облегчить его замену в случае необходимости.




После изготовления платы нужно обязательно проверить полученное на предмет соответствия принципиальной и монтажной схемам. Используя мультиметр, я проверяю входы и выходы на предмет короткого замыкания (лучше не «прозванивать» контакты, а измерять их сопротивление, так как в случае ошибочного изготовления или проектирования может образоваться, например, сопротивление в сотню ом по входу, которое может не «прозвониться», но его наличие будет ошибкой в схеме и может доставить большие неприятности), а также убеждаюсь, что всё подсоединено так как нужно внутри платы.
После проверки перед сборкой следует убедиться, что плата будет нормально работать при подключении всей периферии. Для этого нужно сначала подключить аккумуляторный блок, переключатель питания и щелкнуть переключателем. Должны загореться светодиоды на преобразователях напряжения и ничего не сгореть. Пока ничего не подключено необходимо отрегулировать выходное напряжение преобразователей. Затем отключается питание, подключается модуль реле и снова подаётся питание. Таким образом, поэтапно и под контролем подключается вся периферия.

Замечу, что расстояние между двумя соседними двигателями довольно большое. Это важный момент, на который стоит обратить внимание по следующей причине. Дело в том, что выбранные двигатели без обратной связи. Просто подаём на них определённый уровень напряжения и они крутятся с определённой скоростью. Но характеристики двигателей могут отличаться, что наверняка будет приводить к проблемам при прямолинейном движении. Если разброс двигателей мал и робот будет управляться только оператором, который всегда может подкорректировать движение, то это может быть несущественной проблемой. Но если разброс значимый или робот должен будет проехать большое расстояние «по прямой» в автоматическом режиме, то необходимо предусмотреть обратную связь. Существует идентичная по конструктиву серия двигателей GM25-370, на которых уже установлены датчики Холла. Что это такое? С обратной стороны двигателя, на удлинённый вал, крепится диск, с размещённым на нём магнитом, который будет влиять на датчик Холла. После каждого полного оборота диска мы получаем импульсный сигнал, обрабатывая который можно установить количество оборотов в минуту. Таким образом, в нашу платформу закладывается довольно серьёзный задел на будущее: возможно установить двигатели с обратной связью, подключить их к плате питания, которая запитает датчики на них, а сигналы телеметрии передать на плату управления - система управления может автоматически выравнивать скорость двигателей.


Провода к двигателям я припаял в соответствии с метками на них – на каждом двигателе около одного из двух контактов была нанесена красная точка. После получения двигателей я проверял их, но не обратил внимания на корректность этой маркировки. Один из двигателей, кстати, пришёл с браком и совсем не прокручивался, продавец любезно мне выслал замену, которая добиралась до меня не менее месяца. Впоследствии оказалось, что у одного из двигателей маркировка была перепутана, но это не беда – достаточно просто поменять полярность подключения этого двигателя к плате питания. Забегая вперёд, скажу, что такая же ситуация случилась и с подключением «бортов» - при подаче команды «вперёд» колёса по правому борту вращались вперёд, по левому – назад. Это исправляется так же изменением полярности подключения нужного канала драйвера двигателей к плате питания. Изменение полярности подключения – не надо ничего перепаивать или переделывать, нужно просто поменять провода местами.
Для того, чтобы исключить электрический контакт плат электроники с корпусом я вырезал из блистерной упаковки пластиковые пластины на дно платформы.

Устанавливаем аккумуляторный блок. Пластик очень мягкий и буквально проседает под головкой винта, не спасает даже шайба, поэтому пришлось использовать длинную металлическую пластинку.


Все наши болтики и гаечки со стороны дна несильно уменьшили дорожный просвет и смотрятся довольно эстетично.


Изолируем дно в местах установки электронных плат. На металлическую пластинку в аккумуляторном блоке тоже вырезаем и кладем полоску пластика, чтобы исключить даже царапание корпуса аккумулятора о головку винта, литий – это же серьезно!


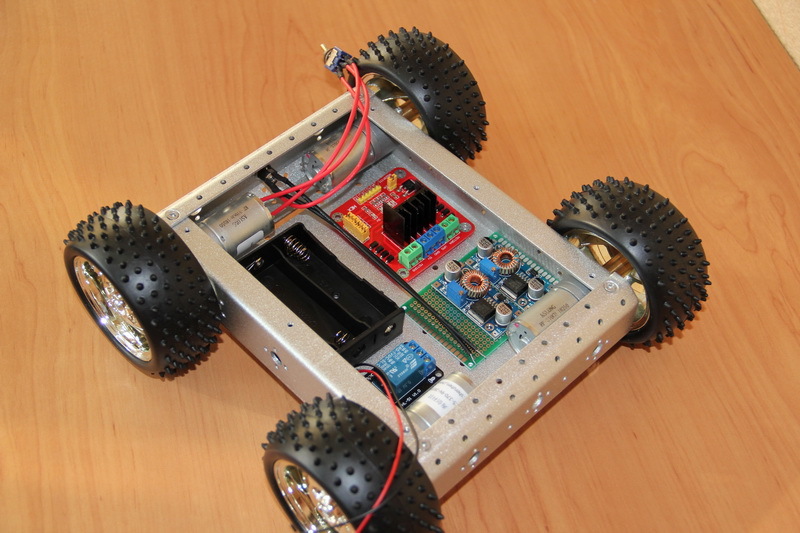
Устанавливаем и прикручиваем электронные платы и разъём питания.






Кошмар, сколько проводов… Подключаем периферию к плате питания.


Я выбрал плату Arduino Nano, нашел к ней недорогую и удобную плату расширения для подключения периферии и модуль bluetooth. Базовая идея – управление нашей платформой с смартфона через bluetooth. Плата расширения, своим обилием контактов для подключения внешних устройств, позволит в будущем беспроблемно подключить будущую периферию робота.


Теперь нам необходимо разработать и сделать монтажную плату для этой электроники. Будем делать «бутерброд»: монтажная плата, на которую устанавливаются модуль bluetooth и плата расширения, в которую, в свою очередь, устанавливается плата с микроконтроллером.

По сравнению с платой питания эта плата практически чисто коммутационная. В центре к 18-контактному трёхрядному разъёму подключается шлейф, соединяющий эту плату управления с платой питания. С этого разъёма сигналы разводятся на нужные контакты платы расширения, которые потом попадают на нужные, заранее выбранные, контакты микроконтроллера. Также на отдельные контакты на плате выводится напряжение 5 В и Vbat. На плате подведено питание к модулю bluetooth, его входы Rx/Tx соединены с входами Rx/Tx платы Arduino Nano через плату расширения. На плате располагается съёмный двухполярный светодиод, предназначение которого – индикация всех процессов, связанных с питанием. Светодиод может формировать зеленое и красное постоянное свечение, мигать с заданной частотой – этого должно хватить для индикации нормального напряжения аккумуляторного блока, его разряда, индикации процесса заряда и сообщения исправности подключенного источника питания.
Для того, чтобы не запутаться, что и куда нужно подключать, я схематично нарисовал плату Arduino Nano и распределил сигналы для нее.

Порты Rx/Tx занимает модуль bluetooth, который работает по протоколу UART. Сигналы IN1-IN4 по возможности заведены на цифровые порты – полярность этих сигналов будет определять направление вращения двигателей, а ENA/ENB на те порты, которые позволяют выдавать ШИМ сигналы – эти сигналы будут задавать скорость вращения двигателей. Значения сигналов телеметрии платформы будут оцифровываться аналоговыми входами A0-A3 платы Arduino Nano. Светодиод занимает порты A4 и A5, причём он подключен через джамперы. Дело в том, что именно эти два порта нужны для простой организации протокола I2C и, если он нам понадобится, мы просто можем снять джамперы. Светодиод же можно «перекинуть» на другие свободные порты или подключить к освободившимся портам А4 и А5 модуль расширения портов (например, на базе микросхемы PCF8574T – даст дополнительных восемь цифровых портов ввода/вывода, управление модулем осуществляется как раз по протоколу I2C), к паре выводов которого и подключить светодиод. В результате такого распределения подключения сохранились возможности беспроблемного подключения устройств SPI, оцифровки ещё двух аналоговых сигналов, выдачи до четырёх ШИМ сигналов (например, для управления сервоприводами). В общем-то свободных сигналов хотелось бы больше, но их количество можно увеличить, используя PCF8574T. В конце концов, можно использовать еще один Arduino Nano или заменить его на более подходящую для требуемых задач платформу – определённый минимум данное решение вполне обеспечивает.
Также наша плата обеспечивает простое подключение к питанию: присутствуют контакты питания 5 В и напряжения с аккумуляторного блока (до 12,6 В).
Стоит отметить один нюанс используемой платы расширения для Arduino Nano. В принципе, плата расширения позволяет завести на неё Vbat. На плате расширения установлен преобразователь напряжения, который понижает входное напряжение до 5 В и подаёт его на плату Arduino Nano, преобразователь которой понижает его до 3,3 В, и уже это напряжение снимается с платы Arduino Nano и разводится по соответствующим контактам платы расширения. Однако, я не стал так делать и завёл 5 В на соответствующий контакт платы расширения. Кроме этого, контрольный светодиод на плате расширения вообще не светился, если не установлена плата Arduino Nano, то есть данная плата расширения без Arduino Nano, видимо, фактически неработоспособна. В причинах я разбираться не стал, но этот момент отметил.
Изготавливаем эту плату управления.


Устанавливаем на неё электронные платы.



Подготавливаем посадочные места под нашу плату. Заодно устанавливаем переключатель.


И всё собираем.


Теперь нужно изготовить кабель для соединения двух плат. Разъёмы питания так же пропаиваем для надёжности. Правильно и очень внимательно проверяем всё. 12 В должно приходить на 12 В, а 5 В – на 5 В. На картинках монтажных плат питания и управления изображён «вид сверху», то есть, если перевернуть платы, то с нижней, распаечной, стороны плат контакты меняются местами – это надо учитывать при изготовлении кабеля и проброса соответственных проводов в нём. Разъёмы я изготовил просто: сначала набирался ряд проводов с BLS разъёмами и обматывался на 2 раза скотчем. Потом собирались все два/три ряда вместе и снова туго обматывались скотчем. Получался целый и монолитный разъём. В неиспользованные контакты разъёма просто помещались пластиковые BLS разъёмы без контактов.
После изготовления кабеля с платы управления снимаются все электронные платы, и она проверяется с помощью мультиметра так же, как и плата питания. Соединяем плату управления с платой питания и подаём питание. С помощью мультиметра внимательно проверяем контакты питания всех модулей, любопытствуем напряжениями сигналов телеметрии – лишний раз убеждаемся, что всё разведено правильно. Можно этого и не делать, самоуверенно всё собрать, подать питание и обнаружить что каким-то, конечно же мистическим, образом перепутаны провода 5 В и Vbat и у нас сгорела плата Arduino и модуль bluetooth. Но лучше не повторять чужие ошибки.
На фотографии можно видеть, что один из красных проводов питания подкрашен серебристым цветом. Это обозначение проводника, который передаёт напряжение Vbat. Когда собирается устройство, полезно делать «ключи» для подключения. Например, специально не распаивать на разъёме один PLS контакт, а ответное гнездо в кабеле портить или забивать кусочком изоляции – в этом случае реализуется «защита от дурака», так как тогда такой кабель на соответствующий разъём на плате можно установить только безошибочно просто потому, что он иначе не установится (метод не даёт гарантии 100% - в интернете полно картинок, когда особо настойчивым индивидуумам всё же как-то удаётся обходить такую защиту, применив завидное упорство и свою недюжинную силу). Я обычно подкрашиваю соответствующие контакты на разъёмах. Полезно было бы на плате питания так обозначить входные разъёмы DC/DC преобразователей и подкрасить соответствующие гнёзда на плате. Это бы исключило неправильность установки преобразователей, а если использовать несколько цветов, то это исключит перепутывание плат преобразователей, которые формируют 5 В и 9 В. Для обозначения можно использовать яркий женский лак для ногтей. Это маленькое правило сильно помогает при частой сборке/разборке разрабатываемого устройства на этапе его отладки и тестирования.



Подключаем кабель к плате питания.
Я бы хотел ненадолго вернуться к началу статьи, к моменту, когда мы разделили платформу на две части и вынесли плату управления «отдельно». На тот момент это казалось весьма сбалансированным решением. Однако, смотря на обильное поле контактов на плате расширения для Arduino, мы понимаем, что добрая половина этих контактов не может быть задействована при текущей реализации платформы – мы же заняли почти половину разъёмов ввода/вывода на плате Arduino. Да и сам микроконтроллер «крутит» не просто программу для выдачи пары ШИМ сигналов на двигатели, а обеспечивает полный контроль по внутреннему и внешнему питанию всей платформы. Стоит подумать – может быть стоит микроконтроллер включить в состав двигательного отсека нашей платформы? Bluetooth «отдать» «надплатформенной» электронике, которая будет управлять устройствами робота, и продумать с ней интерфейсный стык. Можно организовать протокол UART (займёт два пина микроконтроллера) по которому будет передаваться пакет данных, содержащий направление и скорость вращения двигателей, а также общее состояние платформы… И нужно хорошо подумать над конструктивом, так как места в двигательном отсеке у нас не так много… Хотя… Если развернуть и подвинуть реле…
Ну вот и закончилось моё длинное и местами занудное повествование. Разработано, изготовлено и собрано только «железо» – аппаратное обеспечение платформы. Следующая часть работы – программная. Но это не значит, что дальше работать нужно будет только программистом. В процессе создания прошивки для микроконтроллера и её отладки порой приходится брать мультиметр, а то и осциллограф, и разбираться какой сигнал, куда и в каком виде приходит. Обычно именно в начале этого этапа, в большей степени, проявляются ошибки и недосмотры «железячного» этапа проектирования. Наше устройство очень простое, поэтому если что-то не заработает, то ошибка быстро найдётся. А представляете каково работать с действительно сложными схемами? Там нужно быть гораздо внимательнее и аккуратнее. Так же необходимо будет организовать интерфейс управления через bluetooth с смартфоном – придумать какой-то протокол информационного взаимодействия робота с телефоном. И разработать программное обеспечение, с помощью которого комфортно и удобно управлять роботом. Но это всё – уже другая, отдельная история.
Некоторые используемые инструменты и оборудование
BOSCH GluePen. Клеевой пистолет. По терминологии Bosch – клеевой карандаш. Отличное мобильное решение. Работает на аккумуляторе 18650, то есть с заменой в будущем проблем не будет, а больше там ломаться особо и нечему. Быстро нагревается (15 секунд) и готов к работе, после выключения практически сразу прекращает работу – клей из него не течёт как в других термопистолетах. Нашёл применение в быту и рукоделии. Единственный минус – не такие распространённые клеевые стержни: 7 мм, высокотемпературные 150…170С (подходят стержни DREMEL GG01 и GG03).

GROSS 17718. Инструмент для снятия изоляции (стриппер). Полный аналог известной модели KBT WS-04A, которую множество производителей передарала 1-в-1.

HT-202A. Инструмент для обжима проводов с контактами разъёмов (кримпер).

Solomon SL-30. Надежная паяльная станция. Напряжение питания паяльника 24В. Никелированное жало. Точный температурный контроль.

SAIKE 8858. Он же Element 8032. Он же Yihua 8858. Он же ZHaoxin 858DH. Вариации между этими моделями есть, но исполнение, нагреватели и электроника одни и те же. Неплохой, удобный, дешевый и реально компактный паяльный фен. Покупался на импортном сайте, с последующей доработкой дешевого китайпрома: вытряхивание всякого металлического (!) мусора, отмывка флюса, пропайка контактов на плате, силовой симистор посажен на КПТ8. Пока доволен, фен – как фен, дует, температура и скорость наддува регулируется. В принципе, фен свои деньги оправдывает. Относительно недавняя покупка и пока непонятна статистика по надёжности, но подозреваю, что для нечастых работ сгодится.

Metabo BZ 12SP. Очень старый шуруповёрт. Раритет. Такие уже, наверное, не продаются. Позволяет делать достаточно тонкую работу благодаря хорошей центровке и отсутствию биений шпинделя.

Velleman VTHD02. Минидрель. Или как еще называют – дремель (хотя это неверно так же, как копиры называть ксероксами). Когда-то по акции был куплен комплект, польстился больше на комплект насадок, чем на саму дрель. Однако, она оказалась неплоха с доработкой по питанию. От родного блока питания работает, но под нагрузкой ей как-то тяжеловато. Года два назад, конечно же, исключительно временно, был сделан мобильный блок питания из отсека для четырёх аккумуляторов 18650 с регулируемым выходом. Минидрель стала автономной. С таким питанием минидрель стала себя чувствовать намного лучше и оказалась весьма полезным устройством в хозяйстве.


Noble NB4000P-4. Мультиметр. Удобен тем, что провода убираются полностью внутрь. Приобретён в тяжёлые студенческие годы. То есть – давно. Провода давно отломились – пришлось «приоперировать» от другого вышедшего из строя мультиметра. Теперь провода убираться перестали. Не раз менялась батарейка и предохранитель. Работает до сих пор – удивительная надёжность при посредственной точности.

Fluke 179. Высокоточный мультиметр. Качественный, удобный и, главное, точный инструмент.

Получила как реклама какая-то. Хотя… почему бы и нет – где тут мои комиссионные тогда? Все эти инструменты приведены для общего информирования. В своё время, я, например, открыл для себя стрипперы, которые процесс зачистки проводов превращают из рутины в удовольствие и ничуть не жалею о покупке BOSCH GluePen. Может быть, кому-то поможет эта небольшая подборка.
Для сборки своего робота вовсе необязательно иметь разнообразный и дорогой инструмент, хотя он, безусловно, повышает качество работы и приносит бóльшее удовольствие от неё. Вполне достаточно иметь обычный паяльник, несколько отвёрток и дрель. В конце концов, когда-то у автора этой статьи, давным-давно, в распоряжении имелись всего лишь пассатижи, молоток, пара отвёрток, медная проволока, коловорот (до сих пор где-то есть!) и два сверла, кусочки телефонных проводов и много синей изоленты (нередко - ранее использованной), этого вполне хватало, чтобы сделать простейшую машинку, которая при нажатии на кнопку самостоятельно ехала прямо.
Основные комплектующие
По многочисленным просьбам читателей привожу ссылки (ebay/aliexpress) на основные комплектующие. Ссылки рабочие на сентябрь 2016 года. Заказывалось всё полгода назад (февраль-март 2016 года), поэтому рекомендую поискать дополнительно - может быть сейчас можно купить по более выгодной цене.
Шасси, двигатели, колёса, крепёж - платформа (выбор из двух цветов) + 4 * (колесо 80 мм + крепёж + двигатель(выбор из трёх скоростей))
Обратите внимание на следующий комплект - 130 мм колесо + крепёж + двигатель с датчиком Холла
Обратите внимание на ёмкие аккумуляторы (несколько раз с ними работал - у этих аккумуляторов реальная и заявленная ёмкости обычно совпадают, т.е. в них реально 3400 мАч!) - Panasonic NCR18650B 18650 / 3400мАч / 3,7V / незащищённые Module Bluetooth HC-06 5
0.9% Ужасно - где культура речи, нормальное построение предложений… автору синтаксис, да и морфологию подучить надо! 2
5.9% Затрудняюсь ответить или поясню в комментариях. 12
Кооперативный робот (кобот), который используется как платформа для отработки когнитивных систем в ряде исследовательских проектов.
Платформа антропоморфного типа для разработок в области искуственного интеллекта и когнитивных способностей. iCub - сокращенное от "искуственное познавательное тело.
Платформа Magni от компании Ubiquity Robotics с двумя крупными колесами может перемещать до 100 кг полезной нагрузки, что позволяет создавать на ее основе самых разных роботов. В движение Magni приводят два электромотора мощностью 200 Вт каждый, способных разгонять ее до скорости в 2 м/c на горизонтальной плоскости. Энергетика: 7А +5В и 7А +12В постоянного тока. Компьютерная платформа - Raspberry Pi3 (четырехъядерный), ПО - ROS Kinetic / Ubuntu 16.04. Одна цифровая камера, направленная вперед. Десятиамперный аккумулятор обеспечивает 8 часов работы без подзарядки. При необходимости можно поставить свинцово кислотный аккумулятор мощностью до 32 А, что нарастит время автономной работы до суток. Платформа опционально может оснащаться 3D-сенсором с полем обзора в 120 градусов.
2018.03.16 .
Антропоморфный ходящий двуногий робот, который может использоваться в качестве исследовательской платформы, поскольку позволяет заливать в него собственное ПО.
Платформа андроидного типа с двумя манипуляторами руками, разработка Willow Garage. Примерная стоимость - около $400. Есть версия с одним манипулятором стоимостью $285 тысяч. Цены - на лето 2016 года.
Часть боевых задач может эффективно решаться при помощи дистанционно управляемой техники и роботизированных комплексов. В настоящее время в нашей стране и за рубежом разрабатывается большое количество разнообразных роботов, предназначенных для вооруженных сил. Одной из последних отечественных разработок в этой области является комплекс «Платформа-М». Не так давно эту машину смогли увидеть посетители выставки «День инноваций Южного военного округа», прошедшей в Ростове-на-Дону.
Разработка комплекса «Платформа-М» стартовала в начале текущего десятилетия. Созданием проекта занимался Научно-исследовательский технологический институт «Прогресс» (г. Ижевск). После недавних преобразований проект перешел компании «Ижмаш-Беспилотные системы». Именно эта организация в настоящее время занимается сборкой перспективной техники.
Изделие «Платформа-М» представляет собой универсальную гусеничную машину, которая может получать специальное оснащение и выполнять различные задачи транспортного или боевого характера. Малые габариты и вес не более 1-1,2 т позволяют перевозить машину имеющимися грузовыми автомобилями и успешно решать широкий круг задач.
Многоцелевой робот «Платформа-М» получает броневой корпус, обеспечивающий защиту от стрелкового по 3 классу отечественных стандартов. Гусеничная ходовая часть позволяет машине передвигаться по различным поверхностям, а также преодолевать препятствия. Требуемая подвижность обеспечивается при помощи электромотора мощностью 6 л.с. Питание двигателя производится несколькими аккумуляторами, которые позволяют машине непрерывно работать до двух суток без необходимости перезарядки.
Изделие весом не более 1-1,2 т может развивать скорость до 8 км/ч и преодолевать некоторые препятствия. В частности, обеспечивается подъем на 15-градусный склон. Дальность хода и радиус действия прежде всего зависят от поставленных задач и некоторых других факторов.
«Платформа-М» может оснащаться различным специальным оборудованием. Ранее на выставках демонстрировалась машина с башней, на которой были установлены пулемет и несколько реактивных гранат. При необходимости машина может нести и иное специальное оборудование. Боевое оснащение или другая аппаратура монтируется на крыше шасси, на специальных устройствах.
Представленный на «Дне инноваций ЮВО» образец перспективного робота был оснащен дистанционно управляемым боевым модулем с пулеметом ПКМ и оптико-электронной системой наблюдения и управления огнем. Подобное оборудование позволяет машине выполнять некоторые боевые задачи, в том числе осуществлять огневую поддержку подразделений.
Управление «Платформой-М» осуществляется по радиоканалу с удаленного пульта. В ходе работы робот и пульт устанавливают двухстороннюю связь. При этом с машины на пульт поступают видеосигнал и информация о параметрах работы различного оборудования. Обратно, в свою очередь, идут команды для силовой установки, вооружения или целевого оборудования.
Системы дистанционного управления комплекса «Платформа-М» состоят из нескольких основных блоков. Оператор должен работать с пультом управления, выполненным на основе защищенного ноутбука. К этому устройству подключается антенный комплекс с набором передатчиков и приемных устройств, обеспечивающий двухстороннюю связь с роботом. При условии прямой видимости аппаратура управления обеспечивает работу машины на дальности до 1,5 км от оператора.
Комплекс «Платформа-М» впервые был продемонстрирован весной 2014 года. Тогда дистанционно управляемые машины участвовали в учениях в Калининградской области. Кроме того, эту технику показали на параде 9 мая в Калининграде. В дальнейшем комплекс стал экспонатом прошлогоднего «Дня инноваций министерства обороны».
Еще в прошлом году было объявлено, что робототехнический комплекс «Платформа-М» пошел в серию и поставляется вооруженным силам. Серийные машины имеют разный набор комплектующих и оснащаются различным вооружением. К примеру, на прошлогодних фотографиях можно было увидеть боевые модули с пулеметами и реактивными гранатами. В экспозиции «Дня инноваций ЮВО», в свою очередь, присутствовала «Платформа-М» с пулеметом.
Представляем фотообзор перспективного роботизированного комплекса «Платформа-М», демонстрировавшегося на недавней выставке министерства обороны.

Общий вид изделия

Гусеничный движитель робота

Гусеница

Следы на асфальте неплохо демонстрируют маневренность "Платформы-М"



Общий вид боевого модуля с пулеметным вооружением

Опорная платформа вооружения



Крепления пулемета на платформе

Механизм вертикальной наводки









